もしバイク事故でライダーが意識を失ったとしたら、スマートフォンを取り出して救急車を呼ぶことはできません。
周囲に人がいない山道や夜間の道路であれば、その数分の遅れが命に関わる可能性があります。
Appleはすでに自動車事故検出や転倒検出の領域で、Apple WatchやiPhoneを安全装置として進化させてきました。
今回の特許は、その対象を「二輪車」に広げるものです。
しかも単に大きな衝撃を検出するだけではありません。
回転、落下、速度低下、風切り音、ユーザーの反応、機械学習モデルまで組み合わせて、バイク事故らしさを判定します。
言い換えれば、Apple Watchがライダーの“最後の通報手段”になる可能性を示す特許です。
この記事では、Appleの公開特許 US20250380123A1 の内容を、図面と共に詳しく解説していきます。
(この記事にない図面は、US20250380123A1 からご参照ください。)
特許の概要
特許番号:US 2025/0380123 A1
タイトル:Two-Wheeled Vehicle Crash Detection on Mobile Device
発明者:Vinay R. Majjigi, Bharath Narasimha Rao, Aditya Sarathy, Alvaro J. Melendez Hasbun, Aniket Aranake, Atahar K. Mostafa, David Ojeda Avellaneda, Ethan Goolish, Jessica Y. Yip, Jiajie Xu, Manasi Deshpande, Ming Ying Yang, Mrinal Agarwal, Omar Aziz, Parisa Dehleh Hossein Zadeh, Paul D. Bryan, Rebecca L. Clarkson, Sriram Venkateswaran, Sunny K. Chow, Suresh B. Malakar, Tejal Bhamre, Tianye Sun, Umamahesh Srinivas, Vineel Kumar Reddy Yettella
出願人:Apple Inc.
出願日:2025/6/6
公開日:2025/12/11
特許の詳細については US20250380123A1 を参照してください。
この特許は、Apple WatchやiPhoneのようなモバイルデバイスを使って、オートバイなどの二輪車事故を検出する技術です。対象はオートバイだけに限らず、モペッド、自転車、スクーター、ジェットスキー、スノーモービル、乗馬など、乗り手と乗り物が事故時に分離し得る移動手段にも応用可能とされています。
技術テーマは、複数のセンサーから得られる「マルチモーダル特徴量」を使った事故検出です。
マルチモーダルとは、複数種類の情報を組み合わせるという意味です。
本特許では、加速度、回転速度、速度変化、音、位置情報、気圧、ユーザーの動きなどを組み合わせ、複数の機械学習モデルで事故らしさを判定します。そして最終的には、重大事故かどうかを推定する重症度モデル(severity model)によって、緊急通報に進むべきかどうかを判断します。
この記事の結論を先に述べると、この特許の本質は「バイク事故特有の動き方に合わせて、新たに二輪車事故検出ロジックを作成する」という点にあります。自動車ではスマートフォンが車内にあり、エアバッグや急減速のような分かりやすい手がかりがあります。しかしバイクでは、デバイスは車体ではなくライダーの腕やポケットにあります。事故時にはライダーが投げ出され、回転し、地面に衝突し、滑り、複数回の衝撃を受けることもあります。この違いをAppleは具体的に捉えています。
この記事で分かることは、Appleがどのように二輪車事故を検出しようとしているのか、Apple WatchやiPhoneのどのセンサーが使われるのか、なぜ風切り音やオフロード走行まで判定対象になるのか、そして将来のApple Watchがライダー向け安全デバイスとしてどのように進化し得るのか、という点です。

発明のポイント
Apple Watchが事故後にユーザーへ安否確認する画面

Fig.1 は、スマートウォッチ(100)がオートバイ事故を検知した後のユーザーインターフェースを示す図です。画面上には UI(101)が表示され、ユーザーは “SOS Emergency Call”(102)をスワイプして通報するか、“Cancel”(103)をタップしてアラートを取り消せます。
ここで、ユーザーの操作がなければカウントダウンが始まり、自動的に緊急通報へと進みます。
(正確な図面は、US20250380123A1 をご参照ください。)
低消費電力の常時監視と、高度な機械学習判定との二段構えのシステム
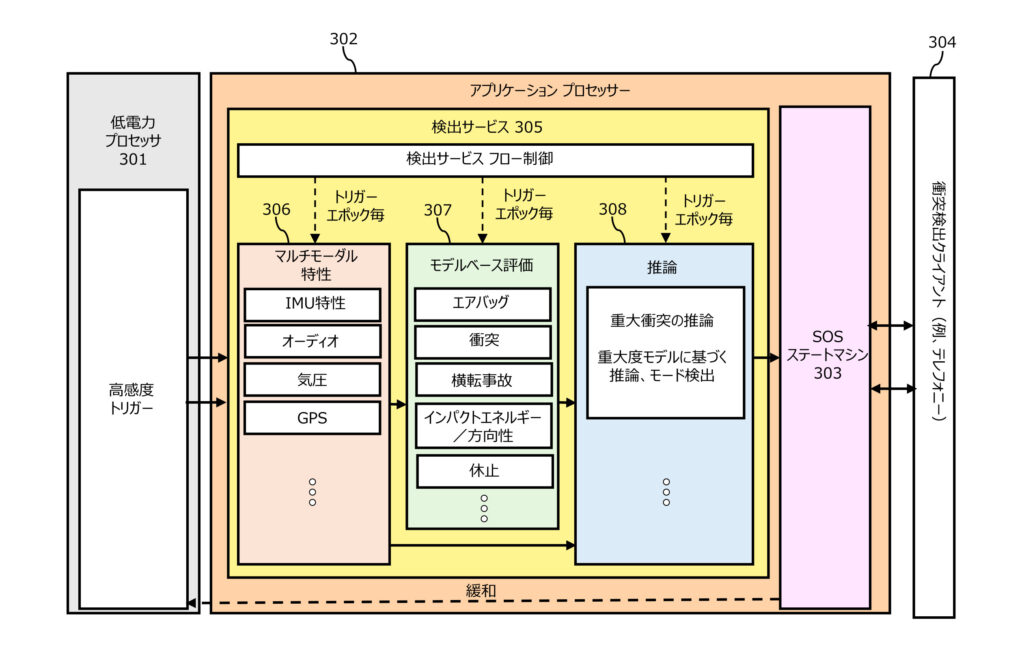
Fig.3 は、システムのブロック図です。低消費電力プロセッサ(301)は常時動作し、事故のトリガーを監視します。
トリガーが見つかると、アプリケーションプロセッサ(302)が起動し、検出サービス(305) が IMU(慣性計測ユニット)、音声、GPS などのバッファからデータを取り出して、マルチモーダル特徴量(306)を抽出します。その特徴量は機械学習モデル(307)に入力され、複数のクラッシュ判定が生成され、最後に推論エンジン(308)が重大度モデルを用いて「実際にオートバイ事故が起きたか」を判断します。事故と判断されれば、SOSステートマシン(303)が UI エスカレーションへ進み、必要に応じて衝突検出クライアント(304)が通報やメッセージ送信を実行します。
(正確な図面は、US20250380123A1 をご参照ください。)
“オートバイの事故”を“車の事故”と区別するための工夫
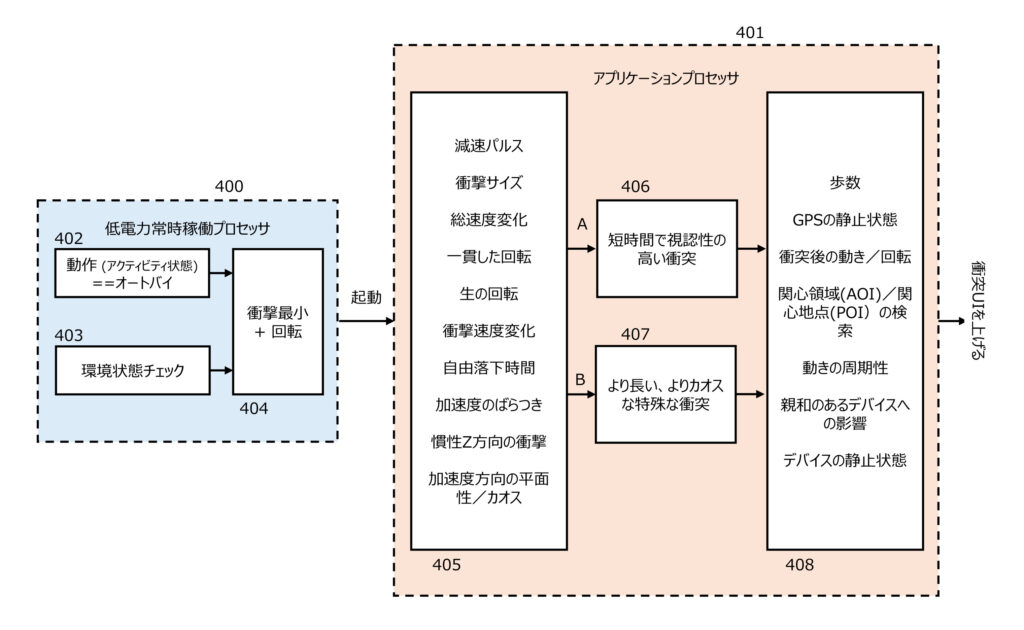
Fig.4 は、事故の判定ロジックを表した図です。
常時稼働プロセッサ(AOP, Always On Processor 400)には、活動状態を推定するアクティビティ分類器(402)、現在の環境が誤検知を起こしやすいかをみる環境状態チェッカー(403)、そして事故候補を見つけるトリガー検出器(404)が配置されています。
アプリケーションプロセッサ(AP, Application Processor 401) が起動すると、特徴(405)として「減速度パルス、衝撃の大きさ、速度変化、一定回転、瞬時回転、衝突時の速度低下、自由落下時間、加速度のばらつき、Z方向衝撃、加速度方向の平面性/カオス性など」が処理されます。これらの特徴(405)に基づいて、アプリケーションプロセッサ(401)は、オートバイの衝突が「典型的な衝突(406)」か「特殊な衝突(407)」かに推論し、その後、事後分類チェッカー(408)で「歩行の有無、GNSS上の静止、衝突後の動き、周辺施設情報、コンパニオン端末への影響、デバイス静止など」を確認して重大性を絞り込みます。
ここで興味深いのは、オートバイの事故を「短く観測しやすい典型的事故」と「長くてカオスな特殊事故」に分けていることです。オートバイの事故は、車と違って一発の大衝撃だけで終わらず、転倒、滑走、複数回接地といった長いイベント列になることがあります。このため、単一の閾値で事故を判定するのではなく、“事故の型”を識別して後段の判定を変える必要があるわけです。これは、従来の自動車の事故検知方法をオートバイの事故へ単純に移植できないことを示しています。
(正確な図面は、US20250380123A1 をご参照ください。)
Bluetoothを二層で使い分ける通信プロトコル
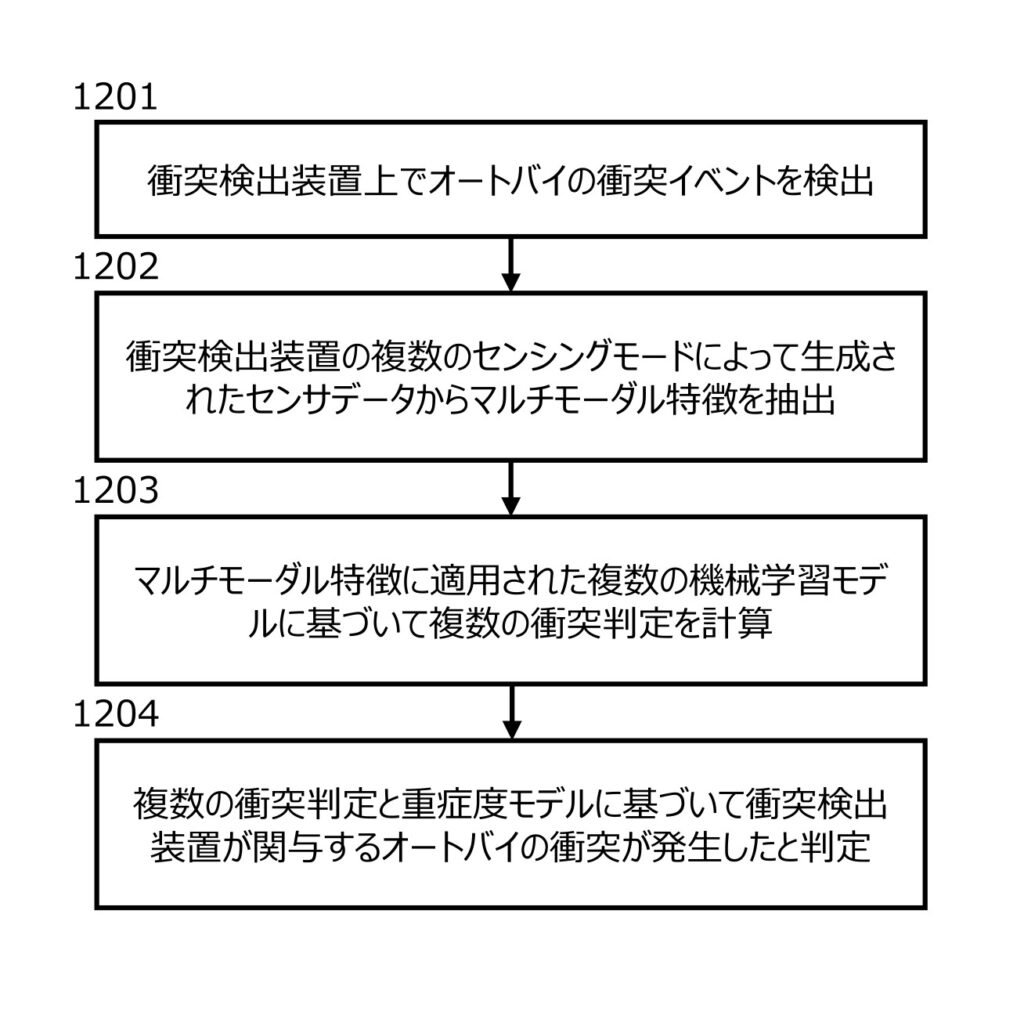
Fig.12 は、オートバイの衝突検出プロセスのフロー図です。ステップ1201 で事故イベントを検出し、ステップ1202 で複数センサー由来のマルチモーダル特徴量を抽出し、ステップ1203 で複数の機械学習モデルから複数のクラッシュ判定を得て、ステップ1204 で重大度モデルに基づいて二輪車事故の発生を決定します。見た目はシンプルですが、この一連の流れの中に、前段のトリガー設計、音・回転・速度の統合、誤検知抑制、重大度判定までが凝縮されています。
この図は、単一センサーの閾値検出だけで判定するのではなく、複数センシング × 複数機械学習モデル判定 × 重大度モデル という多段構成での判定構造が発明の骨格です。二輪車事故のように挙動が複雑で、しかも誤報コストが高いテーマでは、この多段構成が実用性に直結します。
(正確な図面は、US20250380123A1 をご参照ください。)
自動車事故検知の特許 US12485842B2 との違い
Appleが2025年12月に特許取得した US12485842B2 は、モバイルデバイスによる重大な自動車事故の検知に関する特許でした。基本アーキテクチャは今回のオートバイ版 US20250380123A1 とかなり共通しています。低消費電力プロセッサでトリガーを見つけ、アプリケーションプロセッサでマルチモーダル特徴量を抽出し、機械学習モデル群と推論エンジンで重大な衝突を判定します。UI による安否確認、無応答時の自動通報、コンパニオン端末との協調、サーバ側でのパラメータ更新まで含む点も共通です。
ただし、判定処理において両者の差はかなり明確です。自動車版(US12485842B2) では、特徴量として 気圧変化によるエアバッグ展開検知 が強く位置づけられています。特許図面にも Fig.4D、Fig.6A/6B としてその扱いが大きく描かれています。さらに自動車事故を前提とした大音量や速度急低下も主要シグナルです。
これに対しオートバイ版(US20250380123A1) は、「オートバイではデバイスが車両ではなくユーザーに装着されるので、加速度衝撃よりも回転やバランス喪失への依存が高く、エアバッグ検知のようなモダリティは有用性が低い」と説明されています。つまり、自動車中心の事故検知から、ライダー中心の事故検知へと設計思想が変わっています。
さらにオートバイ版では、風切り音を用いて車内走行と開放型走行を区別する処理、オンロードとオフロードを分ける処理、滑走や多重衝突の検出、高ダイナミクス環境において自己監視によって検知を一時的に抑制する仕組みが加わっています。これらは、自動車向け特許には前面には出てこない、オートバイ特有の課題に直結した新規点です。
要するに、自動車版 US12485842B2 が「車両内部で生じる重大事故」を捉えるためのプラットフォームだとすれば、オートバイ版 US20250380123A1 はそれを「身体装着型デバイスが開放環境下でオートバイの事故を推定する」という方向へ特化・再編成した特許だと言えます。
共通するのはマルチモーダル推論の骨格であり、異なるのは“何を事故らしさの中心に置くか”です。自動車版はエアバッグや車内急変、オートバイ版は回転、転倒、風、滑走、路面環境です。
(特許US12485842については「マルチモーダルAIによる高精度衝突検出システム」の記事を参照してください。)
その他の図面の説明
(図面は、US20250380123A1 をご参照ください。)
Fig.2:二輪車事故検知後の時間経過
Fig.2 はイベントタイムライン(200)を示し、事故検知(201)の後、約15秒で通知(202 )が表示され、無応答なら音響アラート付きカウントダウン(203)を経て、最終的に緊急通報(204)に至る流れを表しています。
Fig.5:「衝撃+回転」が近接して起きた場合、アプリケーションプロセッサを起動する
Fig.5 では、トリガー検出器(405)が加速度から衝撃値を求め、ジャイロから角回転ベクトル(502)を算出し、それを時間窓(503)で積算します。角回転ベクトルの大きさが条件(504)を満たし、しかも衝撃のタイムスタンプと近接していれば、AOP から AP へ「ウェイクアップ」信号が送られます。
Fig.6:風切り音でオートバイを識別する
Fig.6 では、マイクで取得した環境音(601)から、平均音量(604)、衝撃前の音量(605)、衝突時の音量(606)を評価します。その上で高い風雑音(607)があるかを調べ、他の特徴量と組み合わせて、ユーザーがオートバイに乗っているのか(608)、逆に車内にいるのか(609)を判別します。
Fig.7:オンロードとオフロードを識別する
Fig.7 では、加速度ベクトル(701)と回転速度ベクトル(702)がダイナミック動作解析器(703) に入力され、通常のオンロード走行(704)か、荒れた路面のオフロード走行(705)かを推定します。オフロード走行では事故に似た挙動が平常時でも多発するため、この処理によって実用的な衝突検出が可能になっています。
Fig.8:自己監視プロセス
Fig.8 は、自己監視プロセス(800)を示し、アルゴリズムが想定外環境で動作していないかを監視し、設計前提を外れているなら、その出力を鵜呑みにしないようにしています。事故検知そのものだけでなく、検知器の信頼性まで監視対象にしているところが、この出願の成熟度を感じさせる部分です。
Fig.9:カスケードプロセス構造
Fig.9 では、センサー処理を多段接続する実システムで、トリガー(902)に対する前処理器(901)と後処理器(903)の出力が、特徴(905) や特徴(908)、さらには分類器(911)の前処理に渡され、最終的に後処理器(912)が分類結果の信頼性を出力します。つまり、上流で怪しい判断が出たとき、下流はそれを無視したり重みを下げたりできます。
Fig.10:オートバイ衝突検出において、高ダイナミクス環境では事故検知を一時停止する判断
Fig.10 では、典型的な舗装路走行では事故検知を有効にし、荒れた路面や激しい競技的走行のように誤検知が出やすい環境では一時抑制する考え方です。常に検知感度を上げるのではなく、環境に応じて感度を変化させています。
Fig.11 オートバイ衝突検出において、短期時間窓と長期時間窓を併用する判定ロジック
Fig.11 の自己監視プロセス(1100)では、短い時間窓で最大衝撃強度と最大衝撃角度(1101)を求め、長い時間窓で履歴的に衝撃強度と角度の瞬時値(1102)を蓄積し、そこから事故検知の有効・無効を切り替えます。これにより、衝突の誤検出のリスクを低減します。
Fig.13 実装対象デバイスのアーキテクチャ
Fig.13 は、衝突検出デバイスのアーキテクチャー(1300)を示します。周辺インターフェースには、モーションセンサー(1310)、位置情報プロセッサー(1315)、電子磁力計(1316)、気圧計(1317)、生体信号センサー(1320)、無線通信サブシステム(1324)、音声サブシステム(1326)、スピーカー(1328)、マイク(1330)、タッチサーフェス(1346)などが接続されます。
筆者の考察
ここからは筆者の考察です。
二輪車事故は、Appleにとっても難しく、かつ価値の高い領域です。自動車事故と違って、二輪車ではライダーの身体がむき出しです。事故時には、デバイスがバイクと一緒に動くとは限りません。むしろライダーの腕やポケットにあるデバイスは、投げ出された身体の動きを直接観測します。
車両側のセンサーではなく、身体側のセンサーだからこそ分かる情報があります。たとえば、ライダーが地面に叩きつけられた瞬間の加速度、空中で回転したときのジャイロデータ、滑走中の断続的な衝撃、事故後にまったく動かない静止状態などです。これはApple Watchのようなウェアラブルに非常に適した情報です。今後、Apple Watchがバイク用ヘルメット、スマートグローブ、バイク本体のBluetoothシステムと連携すれば、さらに強力な事故検出が可能になるでしょう。
また、風切り音を使って二輪車らしさを判断する点も面白いところです。スマートフォンやスマートウォッチのマイクは、通常は通話や音声入力のための部品です。しかし本特許では、マイクが「走行環境を理解するセンサー」として使われています。音圧レベルや風ノイズの有無によって、ユーザーが車内にいるのか、外気にさらされる乗り物に乗っているのかを推定するわけです。
製品の可能性としては、将来のApple Watchに「二輪用安全検出」や「二輪乗車検出」のような機能が搭載されることが考えられます。ツーリング開始を自動検出し、走行中は事故検出を強化し、事故後は位置情報付きで緊急連絡を行う。そして、ライダーが無事ならワンタップでキャンセルできる。これはバイクユーザーにとって、かなり魅力的な安全機能になるはずです。
また、この技術はバイクだけでなく、電動キックボード、e-バイク、スキー、スノーモービル、乗馬、マリンスポーツにも広がる可能性があります。都市部では電動モビリティの利用が増えており、車よりも身体が露出する移動手段が増えています。その意味で、この特許はAppleが次世代モビリティ時代の安全機能を先取りしているものとも読めます。
まとめ
- Appleの特許US 20250380123 A1は、Apple WatchやiPhoneで二輪車事故を検出する技術です。
- 加速度、回転、速度低下、音圧、風切り音、位置情報などを組み合わせ、機械学習モデルと重症度モデルで事故を判定します。
- 自動車事故とは異なり、二輪車事故ではライダーの回転、投げ出され、滑走、複数衝撃といった特有の動きが重視されます。
- 将来的には、Apple Watchがライダーの命を守る安全デバイスとして、ツーリングや電動モビリティ時代の重要な機能になる可能性があります。
最後までお読みいただきありがとうございました。


※企業の特許は、製品になるものも、ならないものも、どちらも出願されます。今回紹介した特許が製品になるかどうか現時点では不明です。ご注意ください。