スマートフォンは、画面をタップした場所は分かります。
顔を見ているか、歩いているか、端末が傾いているかも分かります。
しかし、「ユーザーが端末のどこを握っているか」は、意外と難しい情報です。
上を握っているのか、下を握っているのか、片手なのか、両手なのか。
この違いは、UIの押しやすさ、アンテナ性能、スピーカー音質、カメラの遮蔽にまで影響します。
Googleの特許は、この“握り方”を超音波で検出する技術を提案しています。
しかも、特殊な装置を使うのではなく、スマートフォンに内蔵されたスピーカーやマイクで実現する技術です。
この記事では、Googleの特許 US 12627757 B2 において、スマホがユーザーの握り方を検出する方法をわかりやすく解説します。
(この記事にない図面は、US12627757B2 からご参照ください。)
発明の概要
特許番号:US 12627757 B2
タイトル:Hand-Grip Location Detection Using Ultrasound
発明者:Patrick M. Amihood、Octavio Ponce Madrigal、Anton Heistser
出願人:Google LLC
出願日:2023/5/28
公開日:2026/5/12
今回取り上げる特許は、Google の「超音波を用いた手の握り位置検出」に関するものです。
ユーザーがデバイスを握ると、その手が超音波信号の受信に影響を与え、手に近いマイクで受信される超音波信号の振幅またはパワーが増幅されます。これを解析することで、ユーザーの手がどのマイクに近いか、つまりデバイスのどの位置を握っているかを検出するという発明です。
背景にある問題意識はかなり実用的です。スマホの握り方によって、画面上部が押しやすい場合もあれば、下部が押しやすい場合もあります。ある握り方ではピンチ操作がしやすく、別の握り方ではアンテナやカメラを指でふさいでしまうこともあります。
しかし、従来のように複数の振動センサーや静電容量センサーを端末の周囲に配置すると、センサー数が多くなり、小型デバイスへの実装が難しくなります。
この特許のポイントは、特別な超音波センサーを必ずしも追加する必要がない点です。スマートフォンには、すでにスピーカーとマイクがあります。これらを超音波の送信・受信に使えば、追加部品を抑えながら、端末が「どのあたりを握られているか」を推定することができます。
具体的な処理としては、超音波センサーが超音波送信信号を発します。次に、第1トランスデューサと第2トランスデューサで、それぞれ異なる受信信号を取得します。そして、第1受信信号と第2受信信号のパワーレベルを比較し、その比較結果に基づいて、ユーザーがデバイスのどの位置を握っているかを決定します。特許請求項でも、この流れが中核として記載されています。
この技術が実現すると、スマートフォンは単に「入力された操作」に反応するだけでなく、ユーザーの持ち方に応じて先回りできるようになります。たとえば、片手で下側を握っているなら、重要なボタンを親指の届きやすい位置へ寄せる。アンテナ付近が手で覆われているなら、別のアンテナを優先する。スピーカーがふさがれているなら、音響補正を行う。こうした先回りした対応で、使いやすさが大幅にアップします。
発明のポイント
スマホが「握り方」を理解し、ユーザーインターフェースや機能を変える

Fig.1 は、この発明のスマートフォンを示す図です。
ユーザー(104)がデバイス(102)を握り、特定のグリップ(106)を形成しています。端末の画面にはプロンプト(108)が表示され、側面付近にはハプティックセンサー(110-1)が描かれています。また、端末からは無線周波数信号(112)が出ており、単に握り位置を検出するだけでなく、通信やユーザーインターフェースにも関係することが示されています。
Fig.1では、ユーザーのグリップ位置に基づいて、プロンプト(108)の表示位置をユーザーの手に近づける例が示されています。つまり、ユーザーが片手で端末の下側を持っているなら、操作しやすい位置にボタンや通知を出す、という処理を行います。これは現在のスマートフォンでもよく問題になる「片手操作のしづらさ」に対する解決策です。
さらに、ハプティックセンサー(110)について興味深い制御を行っています。ユーザーの手に近い位置のハプティックセンサーは有効にしますが、手から遠く、振動を感じにくい位置のセンサーは無効化しています。これにより、触覚フィードバックの体感品質を上げながら、不要な電力消費を抑えています。
また、無線周波数信号(112)が描写されており、通信性能への応用を示唆しています。つまり、スマートフォンでは、手でアンテナを覆うと通信品質が低下することがありますが、この発明の技術によって、端末が「今、アンテナの近くが握られている」と判断できれば、無線通信モジュール、Bluetooth、UWB、Wi-Fi、GNSS、レーダーなどの構成要素の動作を、送信電力を調整したり、別のアンテナを選択したりする制御が可能になります。
(正確な図面は、US12627757B2 をご参照ください。)
スピーカーで超音波を出し、マイクで受けるセンサー構成
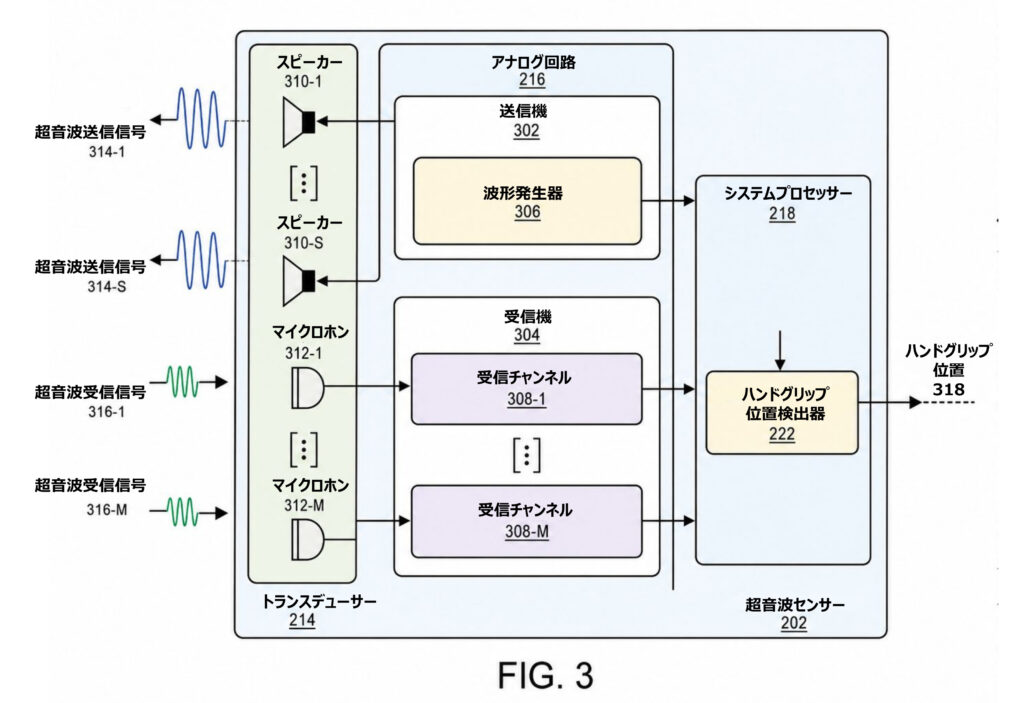
Fig.3 は、超音波センサー(202)の内部構成を説明する図です。
超音波センサー(202)は、トランスデューサ(214)、アナログ回路(216)、システムプロセッサ(218)で構成されています
スピーカー(310-1~310-S)が超音波信号(314-1~314-S )を送信し、マイクロフォン(312-1~312-M)が戻ってきた超音波信号(316-1~316-M)を受信します。送受信は、少なくとも1つのスピーカーと1つのマイクを含むバイスタティック構成として動作します。
特徴的なのは、スピーカー(310)とマイク(312)が、通常の音声再生や音声入力にも使えるという点です。つまり、スマートフォンの音響部品が、必要に応じて“超音波センサー”としても働き、部品の二重利用という合理的な構成になっています。
信号処理の流れは、まず波形生成器(306)が送信用の信号を生成し、スピーカー(310)がそれを超音波として外部環境へ放射します。超音波は、ユーザーの手(104)や周囲環境によって反射・回折・減衰し、マイク(312)で受信されます。この受信信号(316)には、手の位置に応じた振幅、位相、周波数の違いが含まれており、システムプロセッサ(218)に含まれるハンドグリップ位置検出器(222)は、受信信号を解析し、ハンドグリップ位置(318)を求めます。
つまり、接触そのものを直接検出するのではなく、「手が存在することで超音波の受信状態がどう変わるか」によってハンドグリップ位置を検出しているのです。これは、レーダーやソナーに近い発想です。
(正確な図面は、US12627757B2 をご参照ください。)
パワーの違いから握り位置を決める判定ロジック
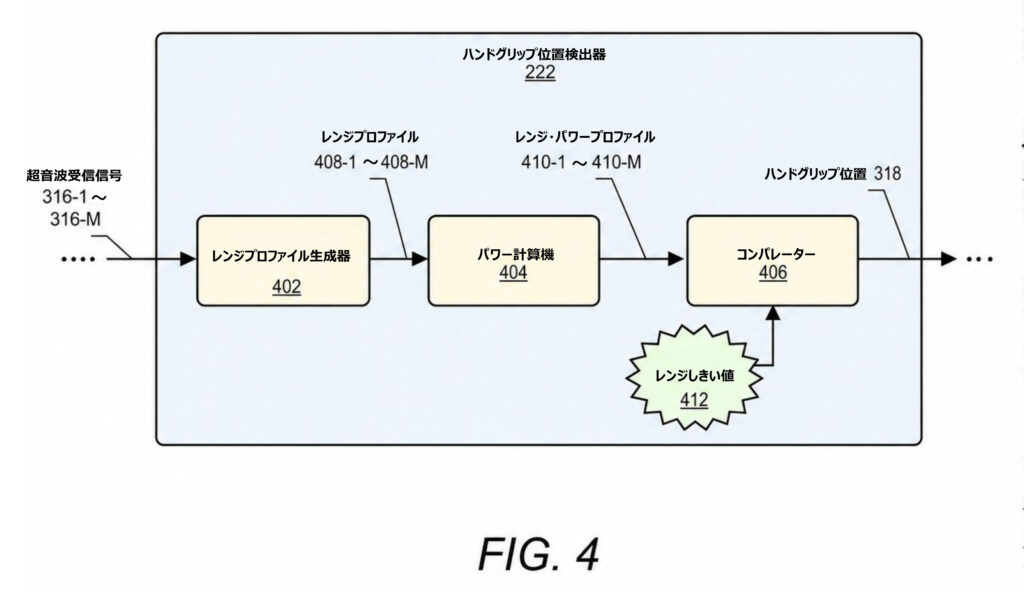
Fig.4 は、ハンドグリップ位置検出器(222)の処理の説明図です。
ハンドグリップ位置検出器(222)には、レンジプロファイル生成器(402)、パワー計算器(404)、比較器(406)が配置されています。
複数の超音波受信信号(316-1~316-M)が入力されると、レンジプロファイル生成器(402)はフーリエ変換によって、レンジプロファイル(408-1~408-M)を生成します。レンジプロファイルは、「どの距離に、どのくらい強い反応があるか」を表す距離方向のプロファイルです。
次に、レンジプロファイル(408)から、パワー計算器(404)がレンジ・パワープロファイル(410-1~410-M)を生成します。これは、受信信号のパワーレベルを距離ごとに表したものです。
そして比較器(406 )が、レンジしきい値(412)の範囲内で、各受信信号のパワーを比較します。つまり、スマホから遠い物体の反射を排除して、端末のすぐ近く、つまり手が存在する可能性が高い範囲の反射を検出します。レンジしきい値は約20cm以下、場合によっては15cm、10cm、5cm程度の範囲となっています。
ハンドグリップの判定としては、たとえば、上側のマイク(312-1)のパワーが、しきい値(412)の範囲内で強ければ、端末上側を握っている可能性が高いと判断します。また、下側のマイク(312-2)のパワーが強ければ、端末下側を握っている可能性が高いと判断します。両者が似ていれば、中間を握っている、または両手で持っている可能性が出てきます。
つまり、単純に「触れた/触れていない」の検出ではなく、複数の受信チャンネル間の相対比較によって位置を推定しています。
(正確な図面は、US12627757B2 をご参照ください。)
握った手に近い方のマイクのパワーが強くなる
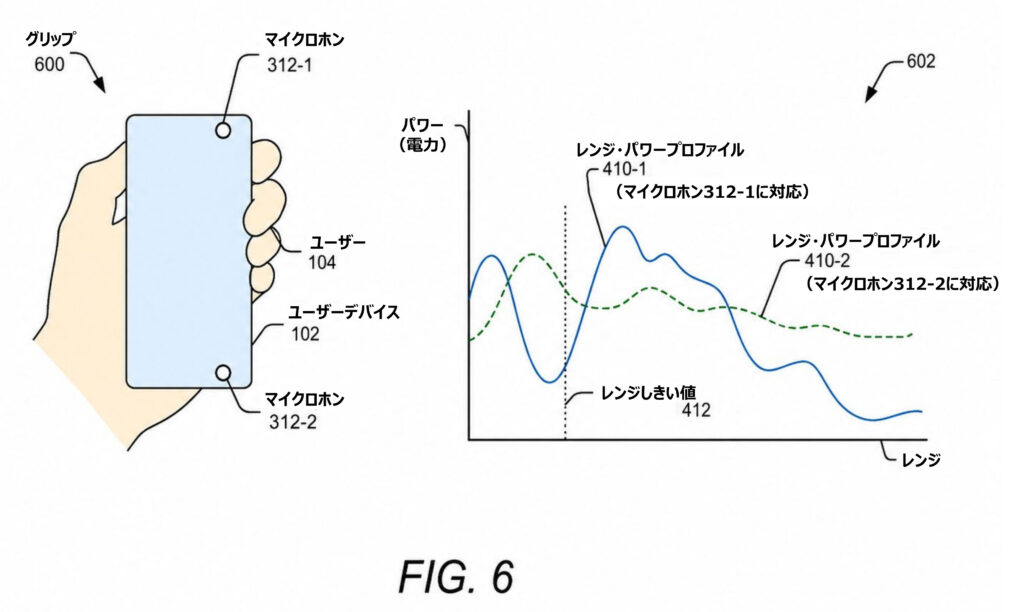
Fig.6 は、具体的な握り方とレンジ・パワープロファイルの関係を示す図です。図の左には、ユーザー(104)がユーザーデバイス(102)の上側を握った状態が描かれています。端末には、上側のマイク(312-1)と下側のマイク(312-2)が配置されています。
この場合、ユーザーの手はマイク(312-1)に近く、マイク(312-2)からは遠くなります。その結果、右のグラフでは、マイク(312-1)に対応するレンジ・パワープロファイル(410-1)が、マイク(312-2)に対応するレンジ・パワープロファイル(410-2)より強くなっています。つまり、手に近いマイクほど、超音波の受信パワーは大きくなります。しきい値(412)の範囲内では 410-1 のパワーが 410-2 より大きくなり、その差は約5dB以上、場合によっては10dB以上になり、その差を比較すれば、ハンドグリップの位置が分かります。
このデータを基に、スマホを片手操作したときの支援が考えられます。端末上側を握っているなら、指が届きにくい位置を避けるUIに変更する。ゲーム中であれば、握り方に合わせて仮想ボタンの位置を変える。電子書籍端末なら、ページ送りボタンを握っている側に寄せる。カメラアプリでは、手がレンズ付近に近い場合に警告を出す。このように、“持ち方に合わせて変化するUI”が実現可能になります。
(正確な図面は、US12627757B2 をご参照ください。)
他の図面の説明
(図面は、US12627757B2 をご参照ください。)
Fig.2:さまざまなデバイスに展開できる超音波センサー
Fig. 2は、さまざまなユーザーデバイス(102)とその構成例を示しています。
Fig.5:スピーカーとマイクの配置例
Fig. 5は、端末前面(500)と背面(502)におけるスピーカー(310-1, 310-2)、マイク(312-1, 312-2, 312-3)の配置を示しています。平面(506)によって端末を第1半部(508-1)と第2半部(508-2)に分け、上側と下側のどちらに手が近いかを判定しやすくする構成です。背面マイク(312-3)を使えば、より細かい握り位置判定も可能になります。
Fig.7:中央付近を握った場合のプロファイル
Fig.6 は、ユーザーが端末上部を握ったときのレンジ・パワープロファイルでしたが、Fig.7 は、ユーザーが端末中央付近を握ったときのグラフ(702)です。この場合、手はマイク(312-1)とマイク(312-2)の中間に位置するため、レンジ・パワープロファイル(410-1)と(410-2)は比較的似た強さになります。ピークパワー差が約3dB以下であれば、中央付近のグリップと判断することができます。
Fig.8:下側を握った場合のプロファイル
Fig. 8は、端末下側を握ったときのグラフ(802)を示しています。ユーザーの手は下側のマイク(312-2)に近いため、レンジ・パワープロファイル(410-2)が(410-1)より強くなります。Fig. 6とは逆のパターンになっています。
Fig.9:超音波グリップ検出の処理フロー
Fig. 9は、グリップ検出方法のフローチャートです。ステップ902 で超音波送信信号を送信し、ステップ904 と ステップ906 で第1および第2の受信信号を取得します。その後、ステップ908 で両者のパワーレベルを比較し、ステップ910 でユーザーの握り位置を決定します。
Fig.10:超音波センサを実装するコンピューティングシステム
Fig. 10は、コンピューティングシステム(1000)の構成例です。
応用可能性
- スマートフォンの片手操作の支援として、ユーザーのグリップ位置によってユーザーインターっフェースを最適化させることが考えられます。
- 通信性能の最適化としては、手による電波への影響を回避するために、電波の通りやすいアンテナを選んだり、送信電力を調整することが考えられます。
- 音響分野では、手がスピーカーをふさいでいるときに音量やイコライザーを自動補正する。マイクがふさがれていたら、別のマイクを優先する。ノイズキャンセリングやビームフォーミングと組み合わせることによって、持ち方に応じて音声品質を改善することが考えられます。
- ARグラス、ゲームコントローラー、自動車の車載ディスプレイへの応用も考えられます。
まとめ
- Googleの特許 US 12627757 B2 は、超音波を使ってユーザーのハンドグリップ位置を検出する技術です。
- スピーカーとマイクを活用し、受信信号のパワー差から端末の上・中央・下などのグリップ位置を推定します。
- UI、通信、音響、ハプティクスを、持ち方に合わせて最適化する、未来のスマートデバイスにつながる発明です。
最後までお読みいただきありがとうございました。
※企業の特許は、製品になるものも、ならないものも、どちらも出願されます。今回紹介した特許が製品になるかどうか現時点では不明です。ご注意ください。