スマートフォンのカメラやFace IDのような深度センサ(Depth Sensor)は、年々高性能になっています。しかし、その裏側ではいつも同じ問題があります。
「もっと薄くしたい。でも、光学性能は落とせない」という問題です。
レンズや反射部品には物理的な厚みが必要で、光を曲げたり、集めたり、分割したりするには一定の距離が必要になります。
Appleの特許 US 12607920 B2 は、この制約に対する解決策を提案しています。
それは、光をまっすぐ進ませるのではなく、透明な基板の中で何度も反射させながら折り畳み、その途中に極薄のメタサーフェス光学素子(MOE)を配置するというものです。いわば、光の通り道を「折り紙」のようにたたんで、極薄の深度センサを作ろうとする発明です。
この記事では、Appleの特許 US 12607920 B2 の内容をわかりやすく解説します。
(この記事にない図面は、US12607920B2 からご参照ください。)
発明の概要
今回の発明の中心にあるのは、透明な誘電体基板の中で光を複数回反射させ、その途中に複数の光学メタサーフェスを配置する小型光学デバイスです。
従来の小型光学系では、光源、レンズ、反射板、出射面などを立体的に組み合わせる必要がありました。たとえば、深度センサ用のパターンプロジェクタでは、VCSELのようなレーザー光源から出た光を、コリメートし、分割し、対象物に向けて投影する必要があるので、一定の光路長が必要になります。
通常はこの必要な光路長を、デバイスの高さ方向に確保するので、デバイスは一定の厚みが必要になります。しかし、今回のAppleの特許では、光を透明基板の内部で横方向に折り返しながら光路長を確保します。具体的には、透明な平行六面体の基板を用意し、その内部で光を複数回反射させます。そして、光が基板の面に当たる位置に、反射型または透過型のメタサーフェス光学素子(MOE)を配置します。MOEは、反射、透過、集光、コリメート、ビーム分割、入射・出射の結合といった複数の役割を担うことができます。
この構成によって、従来ならレンズと光源の間に必要だった縦方向の距離を大幅に削減できます。明細書には、代表的な基板厚さが0.5〜0.7mm、MOEや反射膜などの光学要素は数µm程度であり、パターンプロジェクタ、撮像デバイス、深度センサ全体の厚さを2mm未満にできる可能性が示されています。
光学系を薄くできれば、カメラバンプを小さくしたり、顔認証モジュールを画面下に収めたり、ウェアラブル機器の装着感を改善したりできる可能性があります。スマートフォンや、スマートグラス、Apple Vision Proなどを薄く作ることができます。
MOE(メタサーフェス光学素子)とは、光の波長よりも小さな人工構造である「メタ原子」が、基板材料の2次元平面上に配列された光学デバイスです。光の透過率、位相、偏向、波面を制御することができ、既存の光学素子にはない光学特性を持った素子や、1枚の光学素子で複雑な光学機能(例えば、ビームの整形(コリメーション)、分割(ビームスプリッティング)、傾斜(チルト))を実現できます。
発明のポイント
透明基板の中で光を折り畳む基本構造
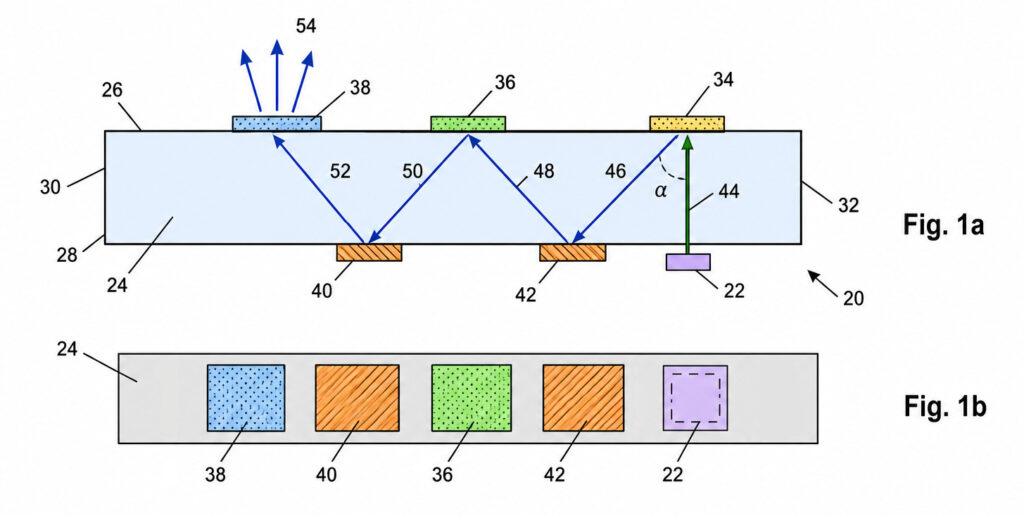
Fig.1aとFig.1bは、深度センサの出射側デバイスを示した図です。光源である VCSEL(22)と、透明な誘電体基板である 基板(24)が描かれています。基板(24)は平行六面体で、光はその内部を内部反射を繰り返しながら進みます。
VCSEL(22)から出た光ビーム 44 は、まず基板(24)に入り、反射型MOEである MOE(34)に当たります。MOE(34)は、ただ光を反射するだけではありません。ビーム 44 を角度αだけ曲げて ビーム 46 にし、同時に集光も行います。つまり、MOE(34)は「反射する」「方向を変える」「焦点を調整する」という複数の機能を一つの薄い面で実行します。
ビーム 46 は反対側の面にある 反射体(42)に当たり、ビーム 48 として折り返されます。ビーム 48 は次に MOE(36)に到達し、さらに反射・集光されて ビーム 50 になります。ビーム 50 は 反射体(40)で再び折り返され、ビーム 52 となって、最終的に透過型MOEである MOE(38)に到達します。MOE(38)はビーム 52 を複数の 出力ビーム 54 に分割し、基板(24)の外へ出射します。
この構成の特徴は、光学系を縦方向に積み上げるのではなく、透明基板の中に寝かせて配置している点です。従来の設計では、VCSELから出た発散光をコリメートするために、光源とレンズの間にある程度の垂直距離が必要でしたが、Fig.1aの構成では、光が基板内をジグザグに進むため、デバイスの高さを抑えながら実効的な光路長を稼ぐことができます。
さらに、MOE(34, 36, 38)の焦点距離を適切に設計することで、VCSEL(22)から出る発散の大きな光でも、出力ビーム 54 をよくコリメートできます。
このような工夫により、デバイス高さを1mm程度にできる可能性があると明細書には記述されています。これは、スマートフォン内部のような極端に限られた空間では非常に大きな意味を持ち、デバイスを薄く作ることが可能になります。
(正確な図面は、US12607920B2 をご参照ください。)
ビームを複数に分割する透過型MOE
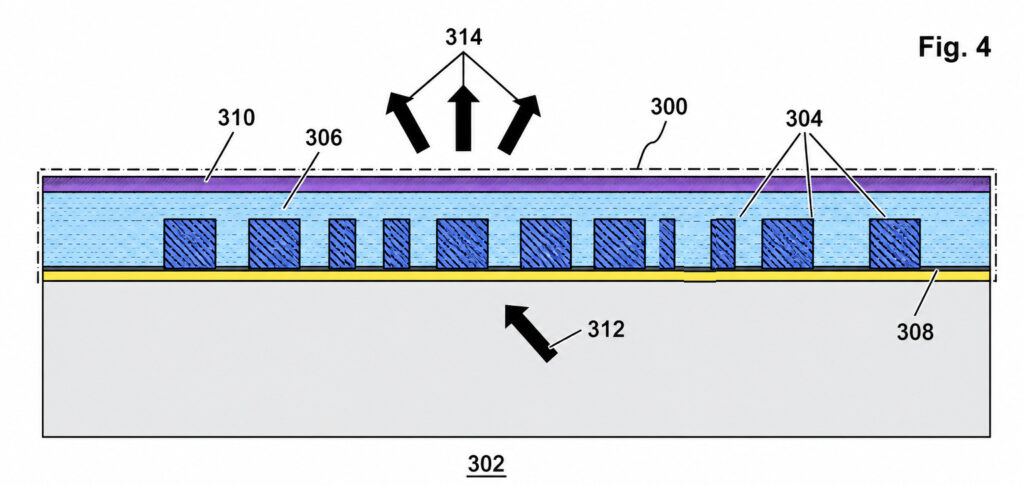
Fig.4は、透過型MOEの構造と働きを示しています。ここに描かれている MOE(300)は、透明な 基板(302)の上に形成されています。MOE(300)は、シリコン柱(304)、それを埋め込む SiO₂層(306)、エッチング深さを制御する SiNエッチストップ層(308)、そして任意の 反射防止コーティング(310)から構成されます。
この図にあるように、MOEはサブ波長サイズの微細な柱が並び、その直径や配置によって光の位相を制御します。光は、見た目にはほぼ平坦な面を通過しますが、その通過時に進行方向や波面が精密に変えられます。この結果、MOEはレンズのような分厚い曲面がなくても光学特性を持つことができるのです。
Fig.4では、基板(302)内を進む ビーム(312)がMOE(300)に当たり、複数の ビーム(314)に分割されて外へ出ていきます。これは、深度センサで使われる構造化光パターンの生成です。たとえば、Face IDのようなシステムでは、対象物や顔に多数の赤外線スポットを投影し、その歪みをカメラで読み取ることで奥行きを推定します。MOE(300)は、この多数のスポットを作り出すための「極薄のビーム分配器」として機能します。
従来であれば、ビーム分割やパターン生成には回折光学素子、レンズアレイ、複数の光学部品などが必要になる場合があります。しかし、この特許では、光を基板内で折り返して整えたうえで、最後に透過型MOEによって複数ビームに分割します。つまり、Fig.1aのMOE(38)のような出射部品を、Fig.4のような微細構造で実現できるわけです。
注目すべきは、MOEが単なる「薄いレンズ」ではなく、光学系そのものを再構成する部品になっている点です。反射するMOE、透過するMOE、焦点を合わせるMOE、ビームを分割するMOEを組み合わせれば、従来は複数のレンズやプリズムで行っていた処理を、基板上の薄膜構造に置き換えることが可能になります。
(正確な図面は、US12607920B2 をご参照ください。)
検出側にもMOEを使う
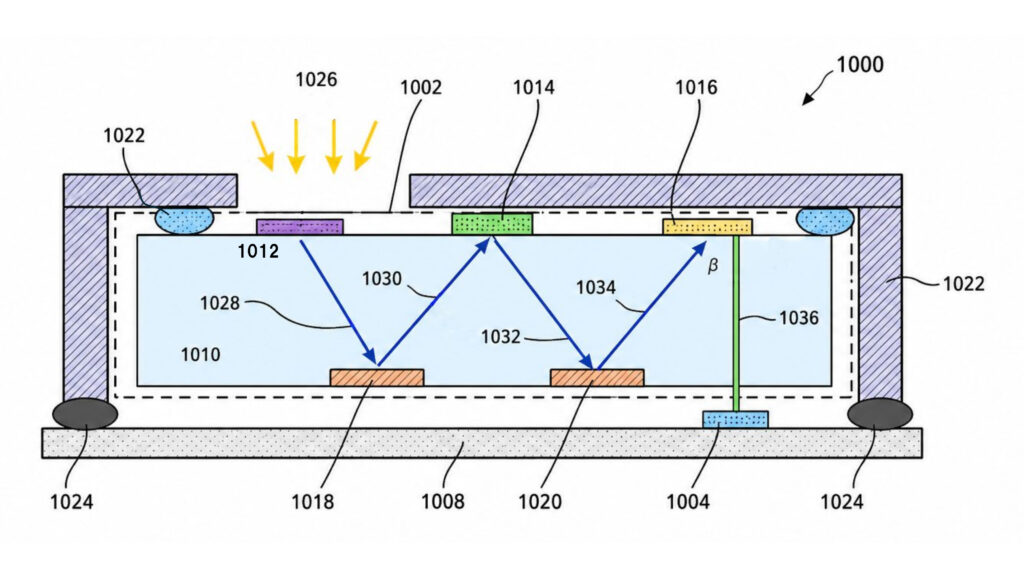
Fig.11は、対象物から戻ってきた光を受け取る受光側の撮像デバイス(1000)を示しています。
ここには、光学デバイス(1002)、検出器アレイ(1004)、ハウジングアセンブリ(1006)、回路基板(1008) が描かれています。光学デバイス(1002)の内部には、透明な基板(1010)、透過型MOEである MOE(1012)、反射型MOEである MOE(1014)と MOE(1016)、さらに反射体(1018)と 反射体(1020)が配置されています。
対象物から反射して戻ってきた光(1026)はまずMOE(1012)に入り、集光されながら ビーム(1028)として基板(1010)の内部に導かれます。その後、反射体(1018)で ビーム 1030 に折り返され、MOE(1014)でさらに反射・集光されて ビーム 1032 になります。ビーム 1032 は反射体(1020)でビーム 1034 となり、最後にMOE(1016)でさらに集光され、角度βだけ曲げられて ビーム 1036 として検出器アレイ(1004)に到達します。
深度センサでは、光を出す側と、戻ってきた光を受け取る側の両方が必要です。投影側だけを薄くしても、受光側のカメラ光学系が厚ければ、モジュール全体は薄くなりません。Fig.11は、戻り光の結像光学系にもMOEと折り畳み光路を適用し、検出器アレイ(1004)へ効率よく像を結ばせる構成となっています。
(正確な図面は、US12607920B2 をご参照ください。)
投影と検出を一体化した深度センサ
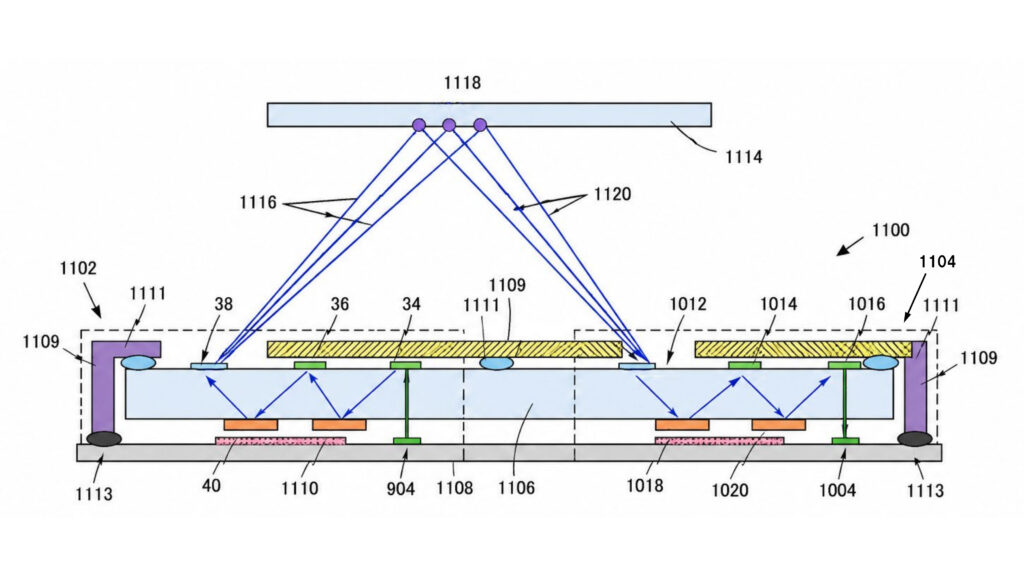
Fig.12は、深度センサ(1100)の説明図です。深度センサ(1100)は、光学パターンプロジェクタ(1102)と 光学撮像デバイス(1104)を組み合わせた構成であり、投影側と検出側の基板は統合され、基板(1106)として示されています。また、回路基板(1108)も一体化されています。
投影側では、電子回路(1110)が VCSEL(904)を駆動し、光学パターンプロジェクタ(1102)が複数の ビーム 1116 を シーン(1114)に向けて投影します。その結果、シーン(1114)上には スポット(1118)が形成されます。検出側では、シーン(1114)から反射して戻ってきた ビーム 1120 が光学撮像デバイス(1104)に取り込まれ、検出器アレイ(1004)に結像されます。そして電子回路(1112)が検出信号を処理し、各スポット(1118)までの距離を計算します。
このように Fig.12は深度センサ(Depth Sensor)として機能し、既知の光パターンを対象物に投影し、その見え方の変化から奥行きを推定します。顔の凹凸、手の形、物体までの距離、室内空間の形状などを読み取ることができます。
明細書では、このようなMOEベースの設計によって、パターンプロジェクタ、撮像デバイス、深度センサ全体の厚さを2mm未満にできる可能性が示されています。
(正確な図面は、US12607920B2 をご参照ください。)
他の図面の説明
(図面は、US12607920B2 をご参照ください。)
Fig.2:反射型MOE の断面構造
Fig.2は、反射型MOE 100の断面構造を示しています。基板(102)上に金属柱(104)が形成され、SiO₂層(106)に埋め込まれ、その上に反射金属層(108)が設けられています。ビーム110 はMOE(100)で反射・偏向・必要に応じて集光され、ビーム112になります。
Fig.3:反射型MOE の断面構造
Fig.3は、Fig.2とは異なる反射型MOE(200)を示しています。こちらは金属柱ではなく、シリコン柱(204)を用いる点が特徴です。SiO₂層(206)、反射金属層(208)、SiNエッチストップ層(210)によって構成され、ビーム212 を ビーム214 へ反射・偏向・集光します。
Fig.5:MOEを基板の両面に配置した光学デバイス
Fig.5は、MOEを基板(404)の両面に配置した別の光学デバイス(400)を示しています。VCSEL(402)から出た ビーム422 は、透過型MOE(414)、反射型MOE(418)、反射型MOE(420)、透過型MOE(416)を経て、複数の ビーム430 として出射されます。Fig.1より自由度の高い設計です。
Fig.6:三次元的折り畳み光学系
Fig.6aとFig.6bは、光路が単一平面内ではない三次元的な折り畳み光学系を示しています。基板(506)上のMOE(508、510、512、514、516)がX方向とY方向にずれて配置され、ビーム518 はビーム520、522、524、526 を経て、複数の ビーム528 として出射されます。線状配置よりも複雑な光学系を小さな面積に収められる点が特徴です。
Fig.7:三次元的折り畳み光学系
Fig.7は、基板(604)の4つの面(606、608、610、612)を光路に利用する構成です。VCSEL(602)からの ビーム622 は、透過型MOE(614)で基板内に結合され、反射体(618、620)で折り返され、透過型MOE(616)から複数の ビーム630 として外に出ます。45度の斜め面を使う点が特徴です。
Fig.8:三次元的折り畳み光学系
Fig.8は、2つの反射型MOE(706、708)を斜めの面(710、712)に配置した構成です。VCSEL(702)からの ビーム714 は、MOE(706)で ビーム716 へ反射・集光され、MOE(708)で複数の ビーム718 に分割されて、面(722)から出射されます。構成要素を減らしながらビーム分割を行う例です。
Fig.9:パターンプロジェクタ
Fig.9は、Fig.1の光学デバイスをパターンプロジェクタ(800)に組み込んだ例です。VCSEL(804)が回路基板(806)に実装され、光学デバイス(802)がスタンドオフ(808、810)を介して配置されます。MOE(38)によって光が複数の ビーム814 に分割され、コンパクトな単一構造のプロジェクタを実現します。
Fig.10:パターンプロジェクタ
Fig.10は、別のパターンプロジェクタ(900)の実装例です。VCSEL(904)は回路基板(906)に実装され、光学デバイス(902)はハウジングアセンブリ(908)にセメント(910)で固定されます。さらにハウジングアセンブリ(908)はセメント(912)で回路基板(906)に接合され、VCSEL(904)との位置合わせが行われます
応用可能性
- この技術の応用先としては、まずは iPhone や iPad のFaceIDに用いる深度センサです。今回のような折り畳み光学系を使えば、投影側と検出側のモジュールをさらに薄くできる可能性があります。将来的には、画面上部のセンサ領域を小さくしたり、ディスプレイ下により多くの光学部品を収めたりする構造が考えられます。
- AR/MRデバイスやロボット、ドローン、自動車の車内センサにも応用できる可能性があります。小型で薄い深度センサは、物体認識、ジェスチャー操作、顔認識、乗員監視、近距離3Dマッピングなどに役立ちます。特に、複数のセンサを広い範囲に分散配置したい場合、個々のモジュールが薄くなることは大きなメリットです。
- レンズのような光学部品を使わず、半導体プロセスで製造するため、精密で量産可能なデバイスとして、薄いモジュールに組み込まれていく可能性があります。
- 課題としては、MOE は波長依存性や入射角依存性を持ちやすく、設計・製造のばらつきも性能に影響します。また、実際の製品では温度変化、落下衝撃、量産時の歩留まり、他部品とのアライメントなども重要になります。
まとめ
- Appleの特許 US 12607920 B2 は、透明基板の内部で光を折り畳み、MOEによって反射、集光、分割、出射を行う小型光学技術です。
- この発明は、深度センサやパターンプロジェクタを極薄化するための有力なアプローチであり、Face ID、ARグラス、空間認識デバイスへの応用が期待されます。
- レンズを小さくするのではなく、MOEを応用したデバイス構造の光学素子であることが特徴です。
最後までお読みいただきありがとうございました。
特許情報
特許番号:US 12607920 B2
タイトル:Folded Projection and Detection System
発明者:Moshe Kriman, Maoz Ovadia, Dana Gal-Fuss
出願人:Apple Inc.
出願日:2022/8/25
公開日:2026/4/21
特許の詳細については US12607920B2 を参照してください。
※企業の特許は、製品になるものも、ならないものも、どちらも出願されます。今回紹介した特許が製品になるかどうか現時点では不明です。ご注意ください。